Seria possível contruir um controle remoto PWM de 8 canais e com 5 botões on/off (modo Pulso) com um PIC 16f628a? Veja esta proposta didática testada…
Muitos hobistas gostam de usar o conhecimento de programação de microcontroladores para controlar dispositivos a distância, como por exemplo, carrinhos de controle remoto. Logicamente, com os servos apropriados ao trabalho, muita coisa pode ser feita. Alguns usam também para controlar antenas de PX/PY (rotação da antena), ajuste de posicionamento de parabólicas para sintonizar satélites diferentes ( de forma pré-programada), acionamento de câmeras de vigilância a distância,etc.
A proposta aqui apresentada, se baseia no controle de servos pelo padrão PWM, em que um pulso de 1ms corresponde a posição inicial do servo (veja figura 3a). Se for colocado 1,5 ms de pulso, o servo se deslocará para a posição central (veja figura 3b) e com 2ms irá para o extremo oposto (veja figura 3c). Valores intermediários irão resultar em posições proporcionais.
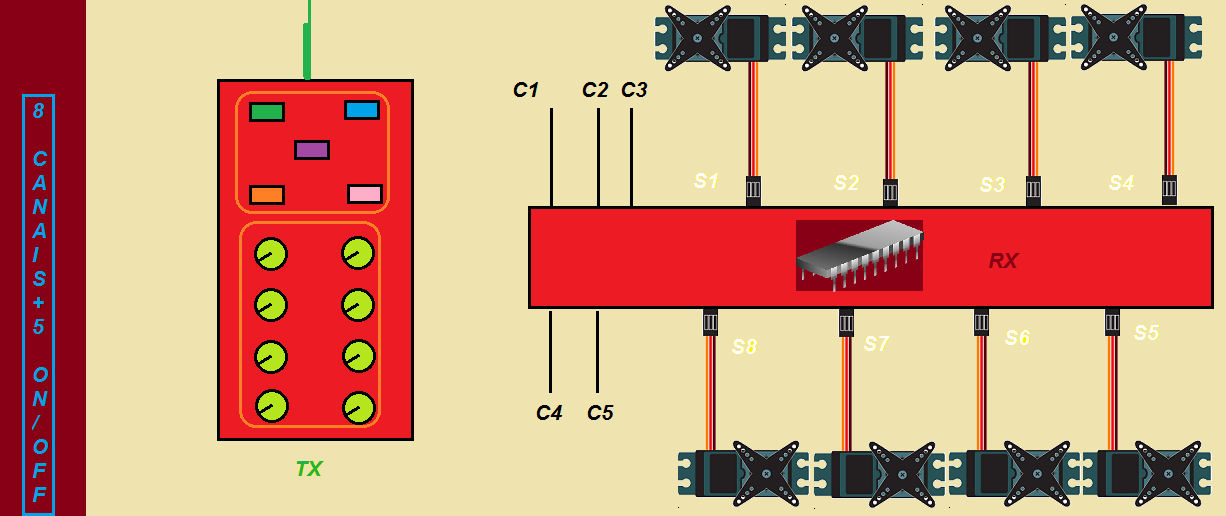
Veja o esquema abaixo do transmissor:

Se resume em um módulo comercial de transmissão, cuja frequencia deverá ser escolhida para a aplicação desejada (27mhz, 49mhz, 72mhz, etc). Para meus testes, usei um tx de 433mhz do tipo parecido com controle remoto de portão. Foi escolhido um cristal de 20 mhz para diminuir o tempo de cada instrução a 200 nanosegundos. No portA recebe os 5 interruptores em modo on/off e o portB, os niveis de controle proporcionais.
Como obtemos os valores da posição do potenciometros, visto que o PIC16F628A não dispões de conversor Analógico/Digital? Pelo tempo que demora a descarga de um capacitor. Observe estes passos:
1) Carregar os capacitores por um tempo suficiente, tornando o portB como saída em nivel ‘1’ em todos os bits.
2) Após a carga, tornamos o portB como entrada em todos os seus bits e testamos em sequência, cada pino.
3) Depois de testar os 8 bits, incrementamos o contador ‘valor’ e voltamos a testar todos os 8 bits em loop, por 256 vezes.
4) Se na ocasião do teste, encontramos nivel ‘0’ no pino testado, carregamos o conteudo de ‘valor’ no registrador de transferência do referido pino, e setamos um flag que impede a captura deste valor novamente. Lembre que o potenciometro está em paralelo com o capacitor e quanto menor o valor regulado, mais rápido ocorrerá a descarga deste.
5) Finalizando as 256 verificações, a rotina vai transmitir os valores capturados para o receptor.
Por testes realizados, chegou-se ao valor do capacitor por volta de 22 nF e 100k para o potenciometro (linear). Outros valores de potenciometros podem ser usados, mas tem que ser acertado o valor do capacitor para corresponder a constante de tempo necessária (ex. potenciometro de 47k e capacitor de 47nF ou potenciometro de 4k7 e capacitor de 470nF).
Abaixo vemos as formas de onda no controle de servos por PWM (1ms a 2ms):

Abaixo vemos as formas de onda para obtenção do valor da posição dos potenciometros:

Que dizer do receptor?
Veja o esquema abaixo:

Também mostra ser bem simples, utilizando outro PIC16F628A, com um cristal de 4mhz, sendo as saídas para os servos no portB e as saídas de botão on/off no portA. Os resistores nas saídas foram colocados para proteção ao manusear, mas podem ser omitidos. O receptor tem que ser na mesma frequencia do transmissor. No teste, usei um receptor de 433mhz (comercial), mas, em uso, deverá ser usada as faixas legais permitidas para isto (consulte a legislação do seu país, quanto a potências e frequencias, bem como de licensas de uso).
Em uma recepção completa são recebidos 11 bytes na sequência: byte de conferência (valida a transmissão), byte dos botões, byte pwm canal 7,byte do canal 6, byte do canal 5, byte do canal 4, byte do canal 3, byte do canal 2, byte do canal 1 e byte do serial number (sempre recebe o bit LSB de cada byte primeiro). Somando-se todos os bytes de dados tem que ter o mesmo valor do byte de conferência. Isto assegura a qualidade da transmissão. Quando ocorre um interrupção de sinal, o receptor mantém os valores anteriores nas saidas (tanto proporcionais como botões).
As saídas são acionadas sequencialmente, usando o periodo de delay da rotina de recepção para fazer o ‘refresh’, chamando a rotina ‘multi_saida’.
O protocolo de transmissão é o adotado nos receptores de HT6p20B, por já estar disponivel com mais facilidade nos projetos deste blog.
Atenção: É importante separar a alimentação do PIC e também do receptor 433 mhz da alimentação dos servos controles. Estes, ao acionarem, geram picos de corrente que podem ‘resetar’ o PIC, ou mesmo, atrapalhar a recepção do sinal momentaneamente.
Obs. Esta montagem foi montada e testada em placa de protoboard apenas, sujeito a bugs ainda não identificados. Esta sendo fornecido o arquivo ASM e HEX que poderão ser alterados segundo as necessidades do hobista. A versão 1 para o receptor, apresentava vibrações e mau funcionamento. Foi substituida pela versão 2, que usa os timers 0 e 1, em modo de interrupção, para gerar os sinais de 1 a 2 mseg nas saídas, com mais precisão e estabilidade. O código para o TX continua o mesmo.
Segue o arquivo ASM do TX:
Segue o arquivo HEX do TX:
Segue o novo arquivo ASM do RX (versão 2 com uso de interrupção do timer0 e 1, mais estável e preciso):
Segue o novo arquivo HEX do RX(versão 2 com uso de interrupção do timer0 e 1, mais estável e preciso):
Adicionalmente, segue pasta com versão que usa infravermelho como meio de transmissão, logicamente mais limitado ao foco do feixe de luz do emissor, mas que em certas aplicações pode ser útil. O software foi mantido o mesmo tanto no TX como no RX. Apenas foi incluído um ci 555 para obter a portadora de 38khz para o TSOP1738, isto no transmissor. No receptor foi necessário inverter o sinal usando um transistor de uso geral NPN, no caso, um BC458.
Se você necessita de uma montagem compacta, com apenas 2 canais PWM e 3 canais on/off, veja este outro artigo ‘FAÇA UM PEQUENO CONTROLE REMOTO PWM DE 2 CANAIS (1MS A 2MS) – COM PIC 12F675’ , bem como o artigo adicional ‘FAÇA UM ‘VERSÁTIL’ CONTROLE REMOTO REMOTO – COM PIC12F675’.
Manuais:
Pic16f628a
Servo-motor
Outros esquemas curiosos
Curiosidades:
Será que toda vida tem um ancestral em comum?
Alguns mitos a respeito da morte examinados mais de perto
Quem projetou primeiro? -Asas da gaivota
O passado e o presente dos brinquedos
Como estimular o desejo de aprender
O abuso do álcool e a saúde
Projetado com a capacidade de aprender sempre
O amor de Deus expresso no amor de uma mãe
Sono: supérfluo ou necessário?
Os custos das minas terrestres
Um universo cheio de surpresas
O som da neve
O que estamos fazendo com nosso alimento?
Mestres medievais da astonomia
Outros assuntos:
Como ser feliz no casamento?
Como se sair bem na escola — seja organizado
Como conversar com seu filho sobre sexting
Aprenda a perdoar
Como criar filhos responsáveis
Como administrar o seu dinheiro
Ensine valores morais a seus filhos
Ensine seus filhos bons principios com atividades de colorir
Como posso ter ânimo para exercitar
Como posso controlar meu peso?
Entrevista com um bioquímico
Adolescentes- O que fazer se estou sofrendo bullying?
Como evitar ferir com palavras?
Como tratar seu cônjuge com respeito?
Perguntas bíblicas respondidas
Até o próximo artigo!!!
70 thoughts on “FAÇA UM CONTROLE REMOTO PWM 8 CANAIS (1MS A 2MS) – COM PIC 16F628A (REF110)”
Comments are closed.



se for usar em aplicaçoes tipo deslocamento de posiçoes, ou seja com 3 posiçoes nao precisará alterar nada.enteressante e notavel deste projeto é a precisao que ele tem..
lario bom dia; quero informar que montei a placa deste monumento estorico, pwm de 8 canais e 5 canais on/off usei um par de radio 315 mhz, obedece todos os canais,porem… quanto ao pwm veja bem se voce aterrar a entrada o servo obedece 100% direita esquerda.agora quando voce gira o potenciometro ele tambem obedece porem voce percebe que ele dar uma leve trepidada,tem como suavisar mais no proprio asm?
Olá José! Acho que você está exagerando um pouco com a expressão ‘monumento estórico’! Não é nada mais que um simples protótipo para ser aperfeiçoado por quem desejar! Gostaria que você confirmasse se está usando alimentação do pic e receptor separada da alimentação dos servos. Tem que ser assim, para os picos de corrente dos motores não atrapalhar o funcionamento. Me retorna…
Claudio
Claudio bom dia sou eu novamente Edmilson tira uma duvida minha este controle remoto seu funciona muito bem e mais uma vez vc esta de parabens Para utilisa lo em automodelismo no caso do tx existe espaço suficiente na carcaça do radio porem para o rx no modelo o espaço é reduzido seria possivel adaptar o fonte do rx para um pic 12f629/75 usando apenas dois ou tres canais proporcionais que é mais que suficiente para os carros rc profissionais. outra coisa no codigo fonte do receptor vc diz para o caso de ter mais de um tx/rx trabalhando junto usar frequencia diferente para um nw interferir no outro .A pergunta é se eu usar dois modulos de 433 mhz porem um numero serial diferente um do outro ainda vai haver interferencia .Eu montei o prototipo em protoboard e nw fiz uso de modulos de radio somente interliguei os pics para ver funcionando .Desde ja obrigado e que Deus continue te dando inteligencia saude e paciencia para publicar seus projetos que contribuem para o aprendizado de pessoas como eu .um abraço Edmilson
Olá Edmilson! Muito obrigado por seu comentário apreciativo. Por favor, veja o novo artigo ‘Faça um pequeno controle remoto pwm….’. Quanto a mudar apenas o serial number, visto que a transmissão é continua, um tx afetará o outro, se estiver próximo. O serial apenas garante que outro tx senão o seu, comande o seu rx. Mas não impede mau funcionamentos, por interferencias de um com outro. O ideal sempre é usar canais diferentes, como acontece na faixa de 27 mhz, onde pode-se obter cristais para os tx com várias frequências diferentes (dentro dos 27mhz).
Cláudio
bom dia lario; primeiramente muito obrigado pela gentileza, e quanto a nova versao do controle pwm de 8 canais deu certo, parou de trepidar e aceitou todos comando, testei o mesmo servomotor em todas as portas
funciona beleza tando para a direita como para a esquerda. srsr eu ja tenho uma plicaçao para este circuito,pois gosto muito de telemetria.abraço
Olá José! Obrigado por retornar sobre o controle remoto Pwm. Estava ansioso para saber se funcionaria. Agora o artigo passará do ‘status’ de simples teoria para ‘funcional’.
Muito obrigado, pela ajuda.
Claudio
lario acrescentei o resistor de pullup conforme mecionado e o resultado foi surpreendente ok agora funciona os 5 canais on/off.
lario ha possibilidade de simular os servos com led ou outros meio, pois desconfio do meu servo, quando comprei ja tinha sido usado em um aeromodelo se existir essa possibilidade me retorne.
Olá José! Acabei de postar a versão 2 para o receptor do controle remoto de 8 canais pwm + 5 botões. O transmissor continua o mesmo. Ainda não chegou os servos que necessito para testes. Poderia verificar se funciona na pratica, visto que você já iniciou a montagem? Se parou aquela ‘vibração’ no servo?
Desde já agradeço a ajuda.
Cláudio