Controlar brinquedos por controle remoto tem sido um dos passatempos mais apreciados por crianças e também ‘adultos’. Muitos gastam ‘fortunas’ comprando replicas de carros, locomotivas, etc. Os menos afortunados nas finanças , preferem ser mais ‘economicos’, montando suas proprias réplicas e construindo seus próprios circuitos eletrônicos. Em alguns casos, queremos apenas controlar alguma coisa a distância, como por exemplo, um aparelho colocado no telhado ou em um prédio distante. Será que poderiamos tirar proveito das facilidades de programação de um microcontrolador para fazermos isto? Veja a resposta…
Veja o esquema abaixo:

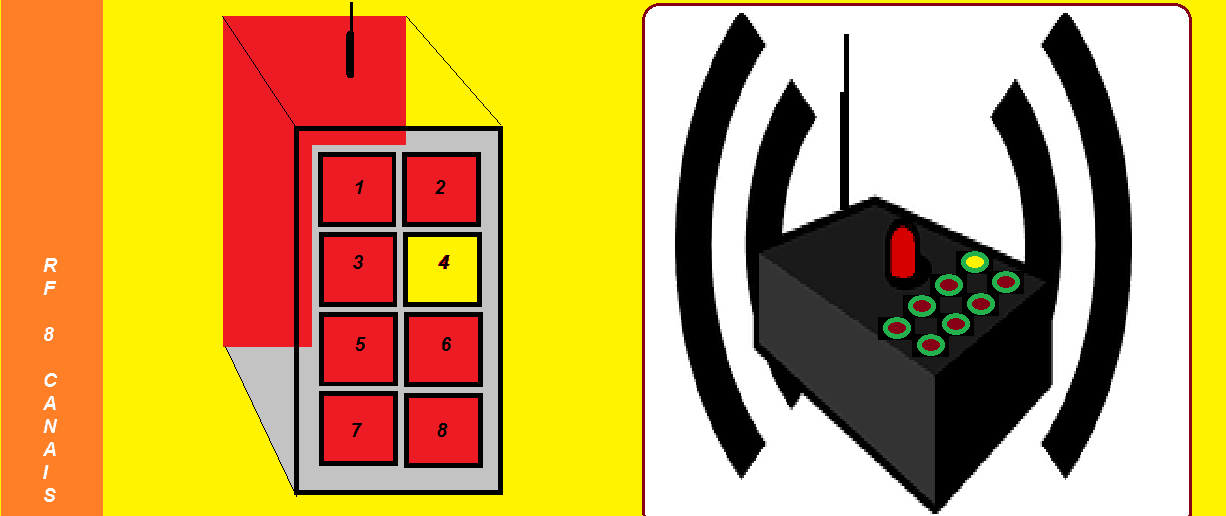
Este projeto experimental, utiliza 2 PIC’s 16F628A , sendo um no transmissor e outro no receptor. No transmissor, temos 8 chaves ligadas aos pinos do PIC, que quando acionadas, setarão as respectivas saidas no receptor (led 0 a led 7). Esta saidas poderão controlar reles de carga, controlando assim maior potência. Cargas pequenas poderão ser controladas por transistores, também pode-se usar foto acopladores como MOC3021 para controlar triac’s diretamente em corrente alternada (lampadas, motores,etc). Use sua imaginação!!!
O protocolo usado, basicamente envia um startbit, seguido por um numero de 8 bit, correspondente ao ‘NÚMERO IDENTIFICADOR’ do aparelho, após o que, vem os 8 bits correspondentes ao estado dos botões e um intervalos final entre transmissões. A idéia do numero do aparelho, é poder usar varios conjuntos tx + rx de numeros diferentes, sem que um controle o outro (pelo menos em teoria). Este número poderá ser alterado no arquivo asm e deverá ser recompilado para obter o novo arquivo hex.
Um bit ‘0’ é formado por 1 periodo de tempo ‘low’ + 2 periodos de tempo ‘high’ na saida, pino 17. O bit ‘1’ corresponde a 2 periodos de tempo em nivel ‘low’, seguido de 1 periodo de tempo em nivel ‘high’ na saida, pino 17.
A rotina de recepção examina a cada 50 microsegundos o estado do pino 17 (entrada de rf) e se=0 incrementa o contador ‘LC’. Se for =’1′, incrementa o contador ‘HC’. A diferença entre eles corresponde ao bit a ser transferido no contador de saida (Res1,Res0). Em uma recepção bem sucedida, o byte Res0 é comparado com um número fixo do aparelho, e se for igual, irá colocar na saida (Portb), os valores recebidos. Caso cesse a transmissão, os contadores de tempos NOTX1 E NOTX, serão decrementados pela rotina, e , chegando em ‘zero’, irão apagar todas as saidas (clrf portb).
Deverá ser usado transmissor e receptor na frequencia cedida a controle remotos na faixa de 27 mhz . Existe muitos vendidos comercialmente, mas poderão ser também montados. Abaixo temos um exemplo ilustrativo de circuito transmissor e receptor, comum nos sites da internet, (porém, não tendo sido testado por mim, nem tenho algum em especial para recomendar):


Como se trata de uma montagem experimental, foi testada apenas em protoboard, com um tx + rx de 433 mhz, mas, para uso em brinquedos, não é permitido, porque nesta frequencia, poderá atrapalhar o funcionamento de equipamentos como portões, alarmes, etc.
Segue abaixo o arquivo ASM para TX:
Segue abaixo o arquivo HEX para TX:
Segue abaixo o arquivo ASM para RX:
Segue abaixo o arquivo HEX para RX:
Adicionalmente, pode-se aproveitar as portas que sobram do portA para colocar uma chave ‘DIP’ externa, com o
objetivo de com um único transmissor, poder controlar vários receptores que usem o mesmo ‘serial number’ escolhido no ASM.
Aquele que tiver a combinação da chave “DIP’ igual a do transmissor é que será acionado naquele momento.
Veja o esquema para esta opção de montagem abaixo:

Como temos 6 bits disponíveis, isto permite usar até 64 receptores em um grupo de mesmo ‘serial number’.
Note que o acionamento é apenas momentâneo, uma vez que paramos de apertar a tecla, a saída do receptor desliga.
Assim, deverá ser previsto circuitos do tipo flip-flop ligados na saída do microcontrolador, quando se desejar funções de ‘retenção’.
Segue o arquivo ASM do TX desta versão com chave ‘DIP’:
Segue o arquivo HEX do TX desta versão com chave ‘DIP’:
Segue o arquivo ASM do RX desta versão com chave ‘DIP’:
Segue o arquivo HEX do RX desta versão com chave ‘DIP’:
Em 15/03/2014, foi realizado modificações no receptor para que se possa escolher entre modo pulso ou retenção, alterando o ASM e recompilando. O esquema é o mesmo, apenas foi ajustado o arquivo ASM. Portanto, segue abaixo a pasta com esta nova versão configurável pino a pino de saída, com atualização em 01/12/2015 (eliminado bug que alternava saída em modo retenção se interruptor fosse continuamente acionado):
Em 16/12/2015 foi feita esta versão abaixo que grava na EEprom a situação das saídas programadas para modo ‘Retenção’, retornando os valores após um reset (como na falta de energia elétrica da rede doméstica):
Caso queira uma versão PWM de 8 canais e 5 botões on/off veja o artigo ‘FAÇA UM CONTROLE REMOTO PWM 8 CANAIS (1MS A 2MS) – COM PIC 16F628A’
Caso deseje outra versão PWM de 2 canais e 3 botões on/off, veja o artigo ‘FAÇA UM PEQUENO CONTROLE REMOTO PWM DE 2 CANAIS (1MS A 2MS) – COM PIC 12F675’
Caso deseje ainda outra versão PWM de 2 canais (sendo uma de 0-5v) e 3 botões on/off, veja o artigo ‘FAÇA UM ‘VERSÁTIL’ CONTROLE REMOTO REMOTO – COM PIC12F675’
Curiosidades:
Filas
Petróleo – acabará algum dia?
Gás Natural – energia para o lar
Ponte da torre – Uma entrada para Londres
Outros assuntos:
Qual o objetivo dos pais ao criar os filhos?
Como lidar com os sogros?
Desempenhem bem o papel de pais
Como reagir ao assédio sexual
Como lidar com problemas financeiros e dívidas
Converse com seus filhos sobre sexo
Assista a este vídeo: O que é um amigo de verdade?
Até o próximo artigo!!!
156 thoughts on “CONTROLE REMOTO 8 CANAIS ON/OFF – PIC 16F628A”
Comments are closed.


Tem como colocar uma linha no código de modo que, ao ligar os 2 PIC’s, no receptor fique um led aceso indicando que está recebendo sinal do transmissor? Ou seja, fique transmitindo algo para o receptor, mesmo sem tecla acionada?
Olá Aslen! Se você não necessitar de 8 canais, poderia deixar uns dos canais ligados direto para sinalizar um led na respectiva saída do pic e usar as outras 7. Para manter os 8 canais e acrescentar mais um, exigirá novo asm, alterando significativamente o atual.
Claudio
lario deixe me exclarescer melhor,pretendo fazer uma demonstração de um controle remoto de 100 canais e prentendo usar os recursos dos deeps.ex no meu controle tx vou usar um pic e no receptor quero usar proximo de 12 pic 96 leds, meu radio controle é 315 mhz,para cada posição do deep comando 8 saidas certo.ou não ficou legal ainda?
Olá José!
Guinness Book?????????
Cláudio
claudio bom dia. tanto posso usar 64 receptores para um um so tx neste controle como tambem poderei utilizar 64 pic para um so radio tx rx certo?
Olá José! Não entendi bem a sua pergunta. Soa meio ‘ redundante’. Para cada TX poderei controlar até 64 RX com mesmo serial e com uma das 64 posições na chave DIP, controlando um por vez, por escolher na chave DIP do TX qual receptor deverei acionar. Cada receptor ,obviamente, terá um pic.
Claudio
🙂 Olá Claudio, 100% este exemplo, montei aqui com um tx e três rx, com a configuração das chaves dip da certinho os comandos,valeu abraços….
Olá Foxcon! Que bom!
Cláudio
Olá Foxconn! Temos agora uma versão d o controle remoto de 8 canais com opção de mudar no programa, de retenção para pulso e vice_versa, de forma individual.
Cláudio
O QUE DEVO ALTERAR NA PROGRAMAÇÃO PARA UTILIZAR COM TRANSMISSOR E RECEPTOR 433MHZ?OBRIGADO.
Olá Caio!
Não precisa alterar nada no programa. Você apenas deverá usar os tx e rx para 433 mhz. Obs. Esta faixa é de uso dos portões automáticos.
Claudio